Journal and Conference Publications
2024

[1] Di-NeRF: Distributed NeRF for Collaborative Learning with Relative Pose Refinement
Mahboubeh Asadi, Kourosh Zareinia, Sajad Saeedi
IEEE Robotics and Automation Letters, vol. 9, pp. 10527-10534, 2024
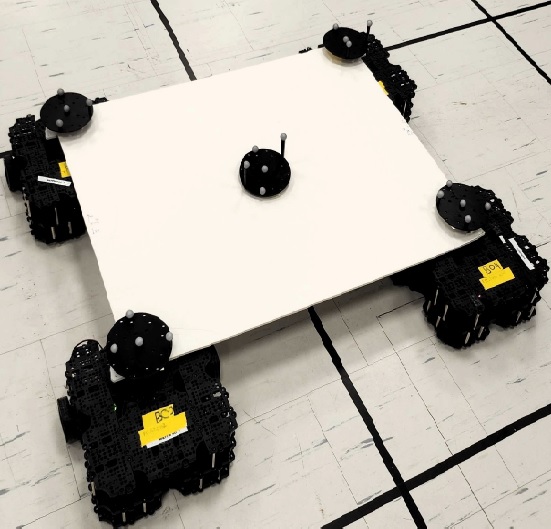
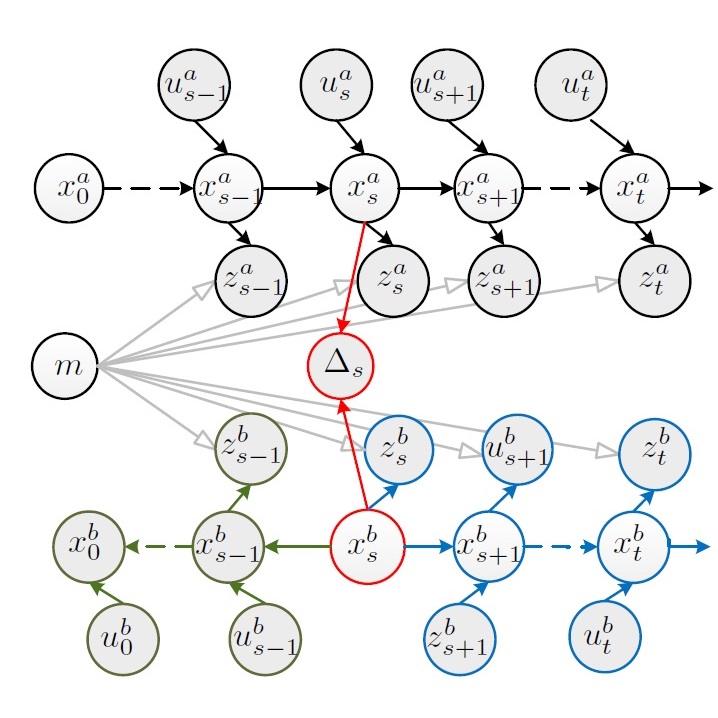
[2] MR.CAP: Multi-robot Joint Control and Planning for Object Transport
Hussein Ali Jaafar, Cheng-Hao Kao, Sajad Saeedi
IEEE Control Systems Letters, vol. 8, pp. 139-144, 2024

[3] A Robot Web for Distributed Many-Device Localisation
Riku Murai, Joseph Ortiz, Sajad Saeedi, Paul HJ Kelly, Andrew J Davison
IEEE Transactions on Robotics, vol. 40, pp. 121-138, 2024
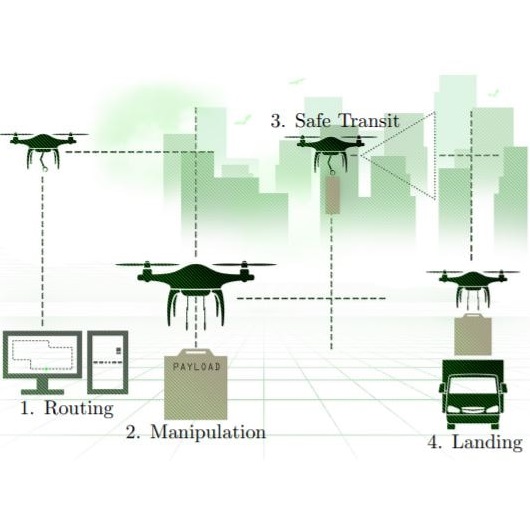
[4] Autonomous aerial robotics for package delivery: A technical review
Jack Saunders, Sajad Saeedi, Wenbin Li
Wiley, Journal of Field Robotics, vol. 41, pp. 3–49 2024

[5] Identifying Optimal Launch Sites of High-Altitude Latex-Balloons using Bayesian Optimisation for the Task of Station-Keeping
Jack Saunders, Sajad Saeedi, Adam Hartshorne, Binbin Xu, Ozgur Simsek, Alan Hunter, Wenbin Li
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Abu Dhabi, UAE, October 14–18, 2024
[6] Visual Inertial Odometry using Focal Plane Binary Features (BIT-VIO)
Matthew Lisondra, Junseo Kim, Riku Murai, Kourosh Zareinia, Sajad Saeedi
IEEE International Conference on Robotics and Automation (ICRA)
Yokohama, Japan, May 13-17, 2024
[7] Structure from WiFi (SfW): RSSI-based Geometric Mapping of Indoor Environments
Junseo Kim, Jill Aghyourli Zalat, Yeganeh Bahoo, Sajad Saeedi
American Control Conference (ACC)
Toronto, Canada, July 10 - 12, 2024

[8] DIO: Dataset of 3D Mesh Models of Indoor Objects for Robotics and Computer Vision Applications
Nillan Nimal, Wenbin Li, Ronald Clark, Sajad Saeedi
arXiv:2402.11836
arXiv

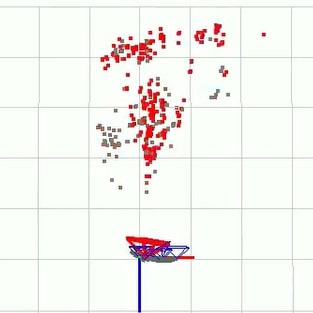
[9] Suspended Magnetometer Survey for Mineral Data Acquisition with Vertical Take-off and Landing Fixed-wing Aircraft
Robel Efrem, Alex Coutu, Sajad Saeedi
arXiv:2402.11797
arXiv
[10] Sensor Integration and Performance Optimizations for Mineral Exploration using Large-scale Hybrid Multirotor UAVs
Robel Efrem, Alex Coutu, Sajad Saeedi
arXiv:2402.11810
arXiv
[11] DPPE: Dense Pose Estimation in a Plenoxels Environment using Gradient Approximation
Christopher Kolios, Yeganeh Bahoo, Sajad Saeedi
arXiv:2403.10773
arXiv
[12] M3RS: Multi-robot, Multi-objective, and Multi-mode Routing and Scheduling
Ishaan Mehta, Junseo Kim, Sharareh Taghipour, Sajad Saeedi
arXiv:2403.16275
arXiv
[13] Inverse k-visibility for RSSI-based Indoor Geometric Mapping
Junseo Kim, Matthew Lisondra, Yeganeh Bahoo, Sajad Saeedi
arXiv:2408.07757
arXiv
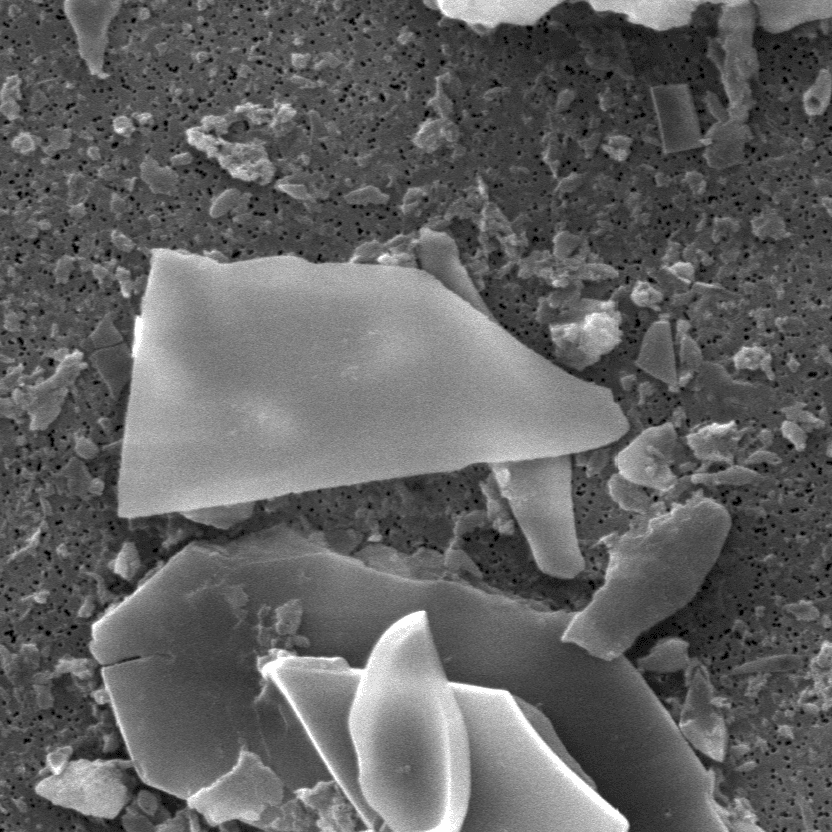
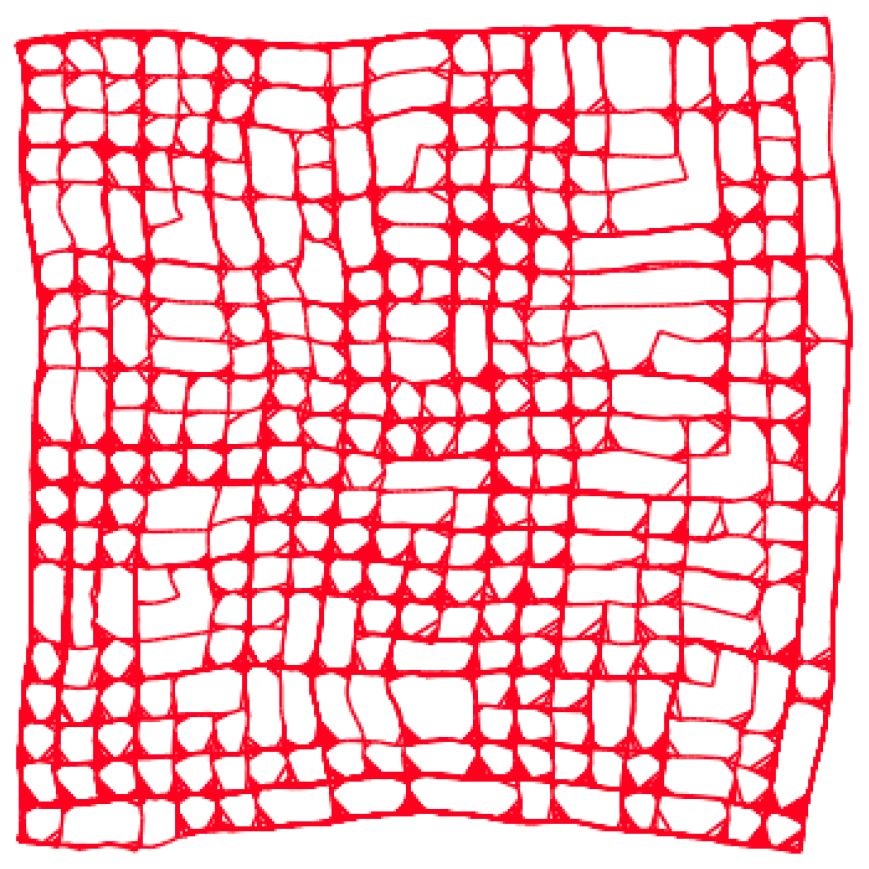
[14] Morphological Detection and Classification of Microplastics and Nanoplastics Emerged from Consumer Products by Deep Learning
Hadi Rezvani, Navid Zarrabi, Ishaan Mehta, Christopher Kolios, Hussein Ali Jaafar, Cheng-Hao Kao, Sajad Saeedi, Nariman Yousefi
arXiv:2409.13688
arXiv

[15] Raspberry PhenoSet: A Phenology-based Dataset for Automated Growth Detection and Yield Estimation
Parham Jafary, Anna Bazangeya, Michelle Pham, Lesley G. Campbell, Sajad Saeedi, Kourosh Zareinia, Habiba Bougherara
arXiv:2411.00967
arXiv
2023
[16] RL-PGO: Reinforcement Learning-based Planar Pose-Graph Optimization
Nikolaos Kourtzanidis, Sajad Saeedi
IEEE Control Systems Letters, vol. 7, pp. 3777-3782, 2023
[17] High-frame-rate Homography and Visual Odometry by Tracking Binary Features from the Focal Plane
Riku Murai, Sajad Saeedi, Paul H.J. Kelly
Springer, Autonomous Robots, vol. 47, pages 1579–1592, 2023
[18] UVC Disinfection Robots: A Review
Ishaan Mehta, Hao-Ya Hsueh, Sharareh Taghipour, Wenbin Li, Sajad Saeedi
Elsevier, Robotics and Autonomous Systems, vol. 161, pp. 104332, 2023
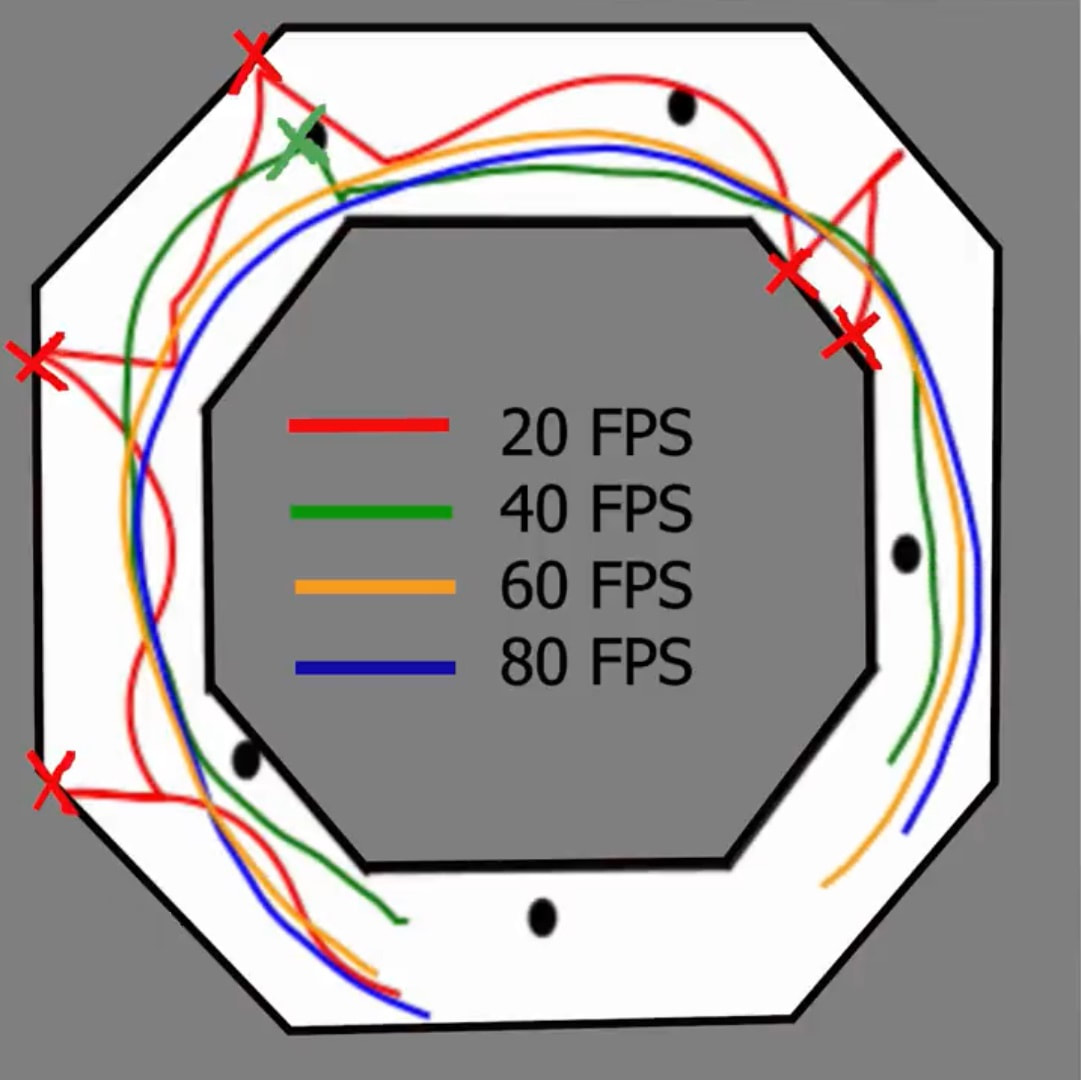
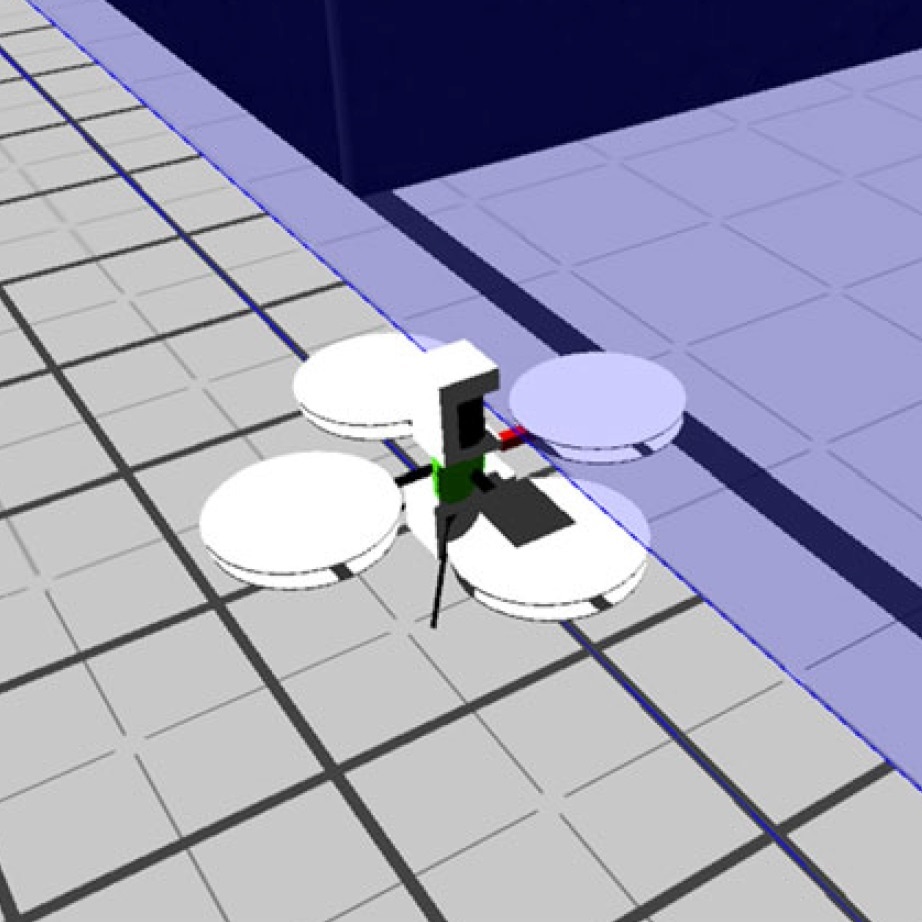
[19] Parallel Reinforcement Learning Simulation for Visual Quadrotor Navigation
Jack Saunders, Sajad Saeedi, Wenbin Li
IEEE/RSJ International Conference on Robotics and Automation (ICRA)
London, UK, May 29 - June 2, 2023
2022
[20] Compiling CNNs with Cain: focal-plane processing for robot navigation
Edward Stow, Abrar Ahsan, Yingying Li, Ali Babaei, Riku Murai, Sajad Saeedi, Paul H.J. Kelly
Springer, Autonomous Robots, vol. 46, pp. 893–910, 2022
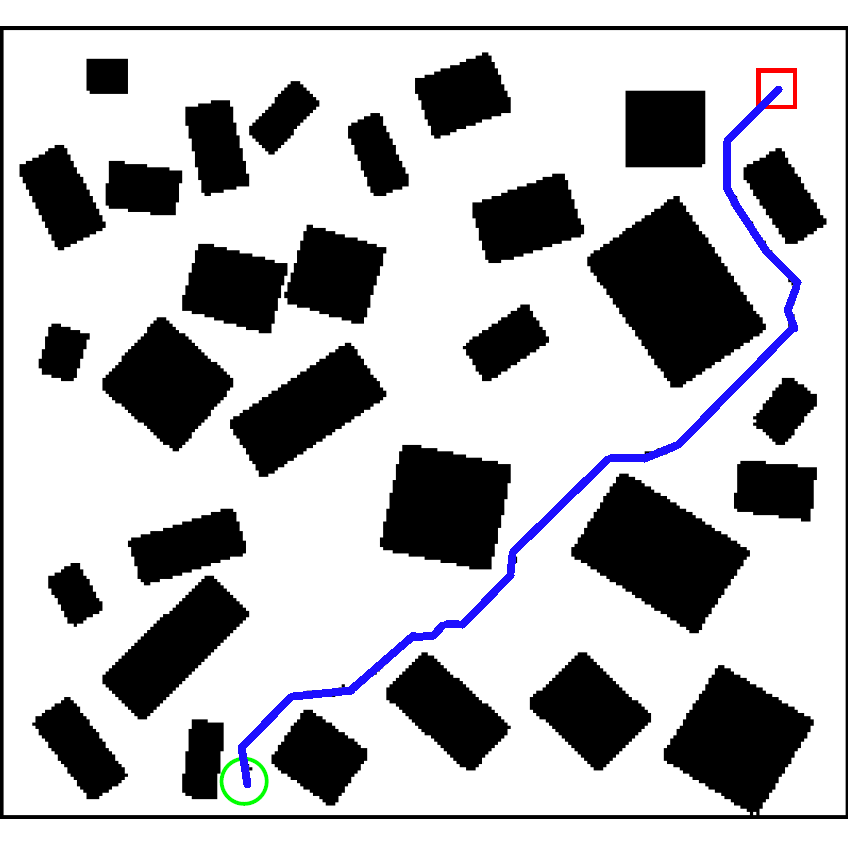
[21] Systematic Comparison of Path Planning Algorithms using PathBench
Hao-Ya Hsueh, Alexandru-Iosif Toma, Hussein Ali Jaafar, Edward Stow, Riku Murai, Paul H.J. Kelly, Sajad Saeedi
Taylor and Francis, Advanced Robotics, vol. 36(11), pp. 566-581, 2022
[22] Pareto Frontier Approximation Network (PA-Net) to Solve Bi-objective TSP
Ishaan Mehta, Sharareh Taghipour, Sajad Saeedi
IEEE International Conference on Automation Science and Engineering (CASE)
Mexico City, Mexico, August 20-24, 2022
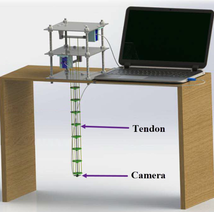
[23] Deep Direct Visual Servoing of Tendon-Driven Continuum Robots
Ibrahim Abdulhafiz, Ali A Nazari, Taha Abbasi-Hashemi, Amir Jalali, Kourosh Zareinia, Sajad Saeedi, Farrokh Janabi-Sharifi
IEEE International Conference on Automation Science and Engineering (CASE)
Mexico City, Mexico, August 20-24, 2022
[24] Far-UV Disinfection with Mobile Manipulator Robotic System
Ishaan Mehta, Hao-Ya Hsueh, Nikolaos Kourtzanidis, Sajad Saeedi
IEEE International Symposium on Medical Robotics (ISMR)
Georgia, USA, April 13-15, 2022
2021
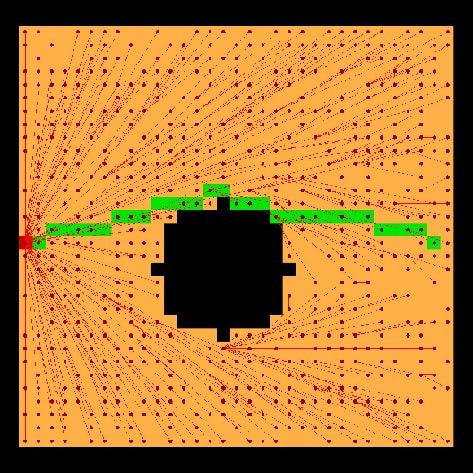
[25] PathBench A Benchmarking Platform for Classical and Learned Path Planning Algorithms
Alexandru-Iosif Toma, Hao-Ya Hsueh, Hussein Ali Jaafar, Riku Murai, Paul H.J. Kelly, Sajad Saeedi
18th Conference on Robots and Vision (CRV)
Burnaby, BC, Canada, May 26-28, 2021
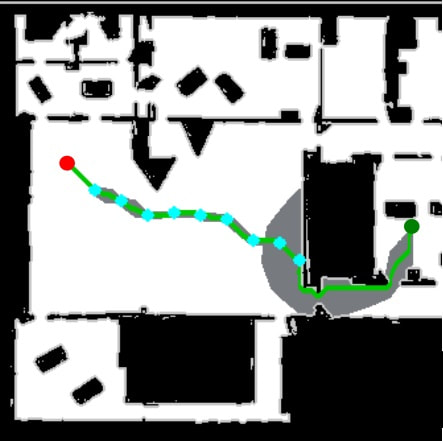
[26] Waypoint Planning Networks (WPN)
Alexandru-Iosif Toma, Hussein Ali Jaafar, Hao-Ya Hsueh, Stephen James, Daniel Lenton, Ronald Clark, Sajad Saeedi
18th Conference on Robots and Vision (CRV)
Burnaby, BC, Canada, May 26-28, 2021
2020
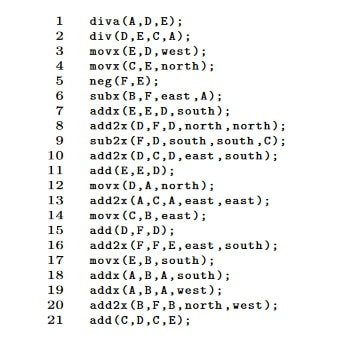
[27] Cain: Automatic Code Generation for Simultaneous Convolutional Kernels on Focal-plane Sensor-processors
Edward Stow, Riku Murai, Sajad Saeedi, and Paul HJ Kelly
Languages and Compilers for Parallel Computing (LCPC)
Stony Brook, NY, USA, Oct 14-16, 2020
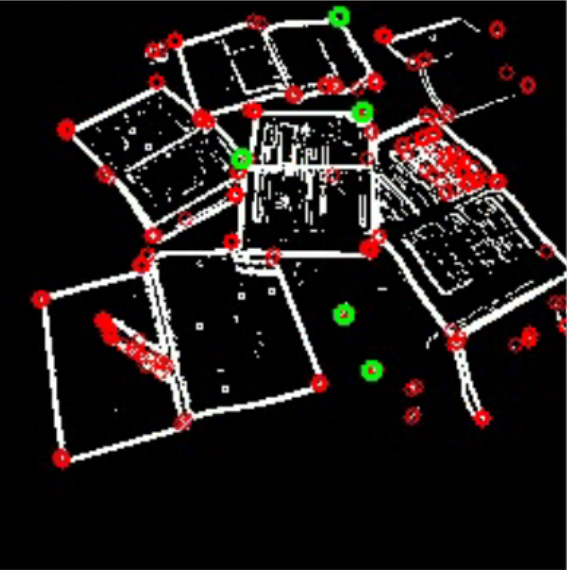
[28] BIT-VO: Visual Odometry at 300 FPS using Binary Features from the Focal Plane
Riku Murai, Sajad Saeedi, and Paul HJ Kelly
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Las Vegas, NV, USA, Oct 25-29, 2020
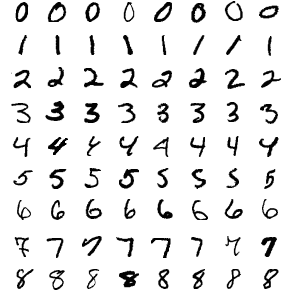
[29] AnalogNet: Convolutional Neural Network Inference on Analog Focal Plane Sensor Processors
Matthew Z Wong, Benoit Guillard, Riku Murai, Sajad Saeedi, and Paul HJ Kelly
arXiv:2006.01765
arXiv
2019
[30] AUKE: Automatic Kernel Code Generation for an Analogue SIMD Focal-Plane Sensor-Processor Array
Thomas Debrunner, Sajad Saeedi, Paul H J Kelly
ACM Transactions on Architecture and Code Optimization, vol. 15(4), pp. 1-26, 2019
[31] Characterizing Visual Localization and Mapping Datasets
Sajad Saeedi, Eduardo DC Carvalho, Wenbin Li, Dimos Tzoumanikas, Stefan Leutenegger, Paul HJ Kelly, Andrew J Davison
IEEE/RSJ International Conference on Robotics and Automation (ICRA)
Montreal, Canada, May 20-24, 2019
[32] SLAMBench 3.0: Systematic Automated Reproducible Evaluation of SLAM Systems for Robot Vision Challenges
M. Bujanca, P. Gafton, S. Saeedi, A. Nisbet, B. Bodin, M. F. P. O’Boyle, A. J. Davison, P. H. J. Kelly, G. Riley, B. Lennox, M. Lujan, S. Furber
IEEE/RSJ International Conference on Robotics and Automation (ICRA)
Montreal, Canada, May 20-24, 2019
![]()
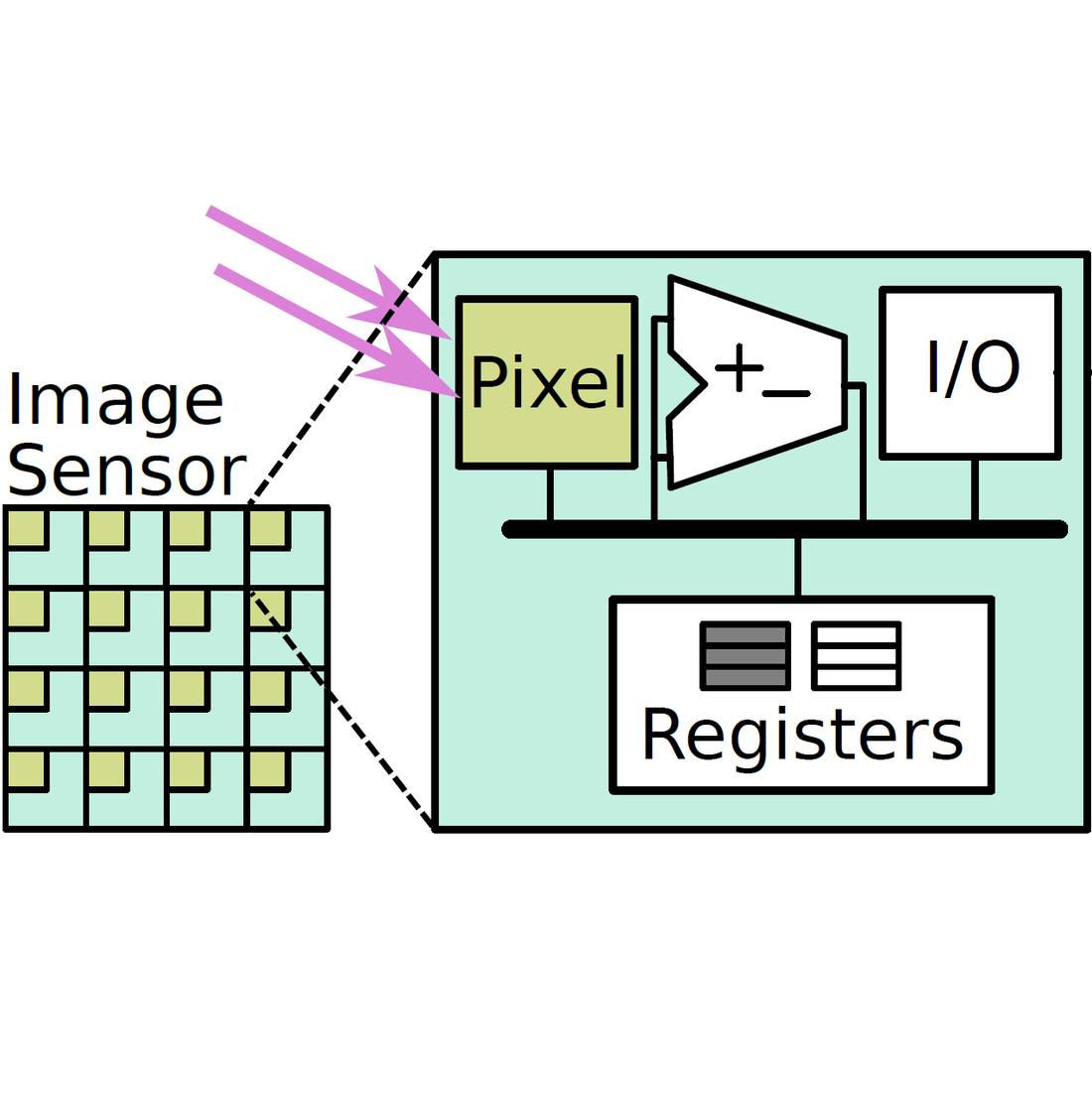
[33] Camera Tracking on Focal-Plane Sensor-Processor Arrays
Thomas Debrunner, Sajad Saeedi, Laurie Bose, Andrew J Davison, Paul H J Kelly
High Performance and Embedded Architecture and Compilation (HiPEAC), Workshop on Programmability and Architectures for Heterogeneous Multicores (MULTIPROG)
Valencia, Spain, January 21-23, 2019
[34] AUKE: Automatic Kernel Code Generation for an Analogue SIMD Focal-Plane Sensor-Processor Array
Thomas Debrunner, Sajad Saeedi, Paul H J Kelly
High Performance and Embedded Architecture and Compilation (HiPEAC)
Valencia, Spain, January 21-23, 2019
2018
[35] Navigating the Landscape for Real-time Localisation and Mapping for Robotics Virtual and Augmented Reality
S. Saeedi, B. Bodin, H. Wagstaff, A. Nisbet, L. Nardi, J. Mawer, N. Melot, O. Palomar, E. Vespa, T. Spink, C. Gorgovan, A. Webb, J. Clarkson, E. Tomusk, T. Debrunner, K. Kaszyk, P. Gonzalez-de-Aledo, A. Rodchenko, G. Riley, C. Kotselidis, B. Franke, M. F. P. O’Boyle, A. J. Davison, P. H. J. Kelly, M. Lujan, and S. Furber
Proceedings of the IEEE, vol. 106(11), pp. 2020-2039, 2018

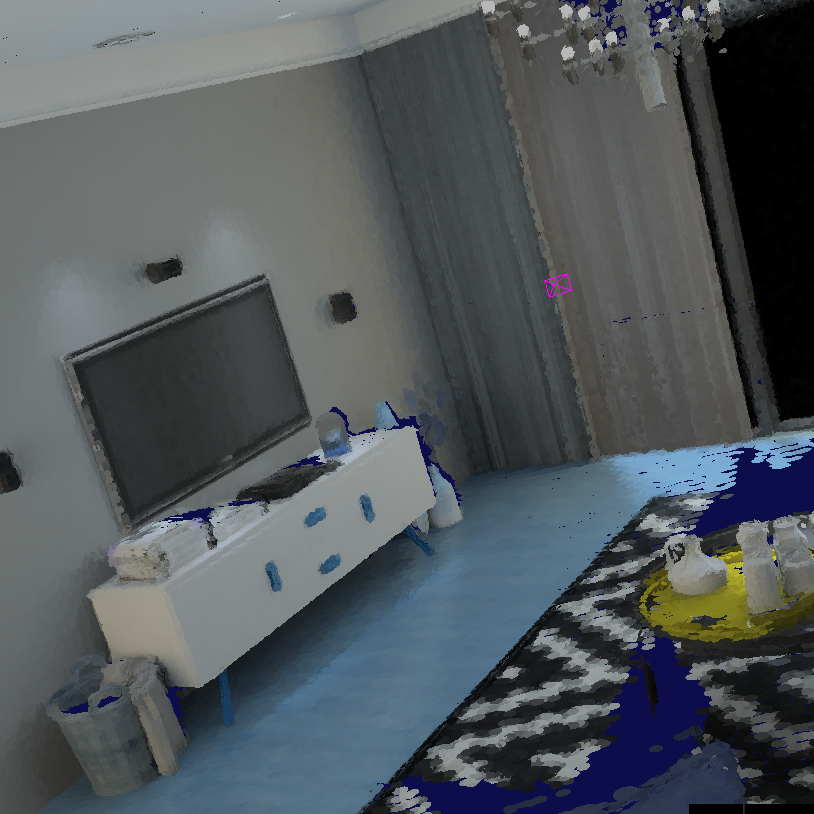
[36] InteriorNet: Mega-scale Multi-sensor Photo-realistic Indoor Scenes Dataset
Wenbin Li, Sajad Saeedi, John McCormac, Ronald Clark, Dimos Tzoumanikas, Qing Ye, Yuzhong Huang, Rui Tang, Stefan Leutenegger
British Machine Vision Conference (BMVC)
Newcastle upon Tyne, UK, September 3 - 25, 2018
[37] SLAMBench2: Multi-Objective Head-to-Head Benchmarking for Visual SLAM
Bruno Bodin, Harry Wagstaff, Sajad Saeedi, Luigi Nardi, Emanuele Vespa, John Mawer, Andy Nisbet, Mikel Lujan, Steve Furber, Andrew J. Davison, Paul Kelly, and Michael F. P. O’Boyle
IEEE International Conference on Robotics and Automation (ICRA)
Brisbane, Australia, May 21 - 25, 2018
2017
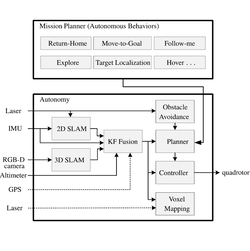
[38] 3D Mapping for Autonomous Quadrotor Aircraft
Sajad Saeedi, Carl Thibault, Michael Trentini, and Howard Li
Unmanned Systems, vol. 5(3), pp. 1-16, 2017
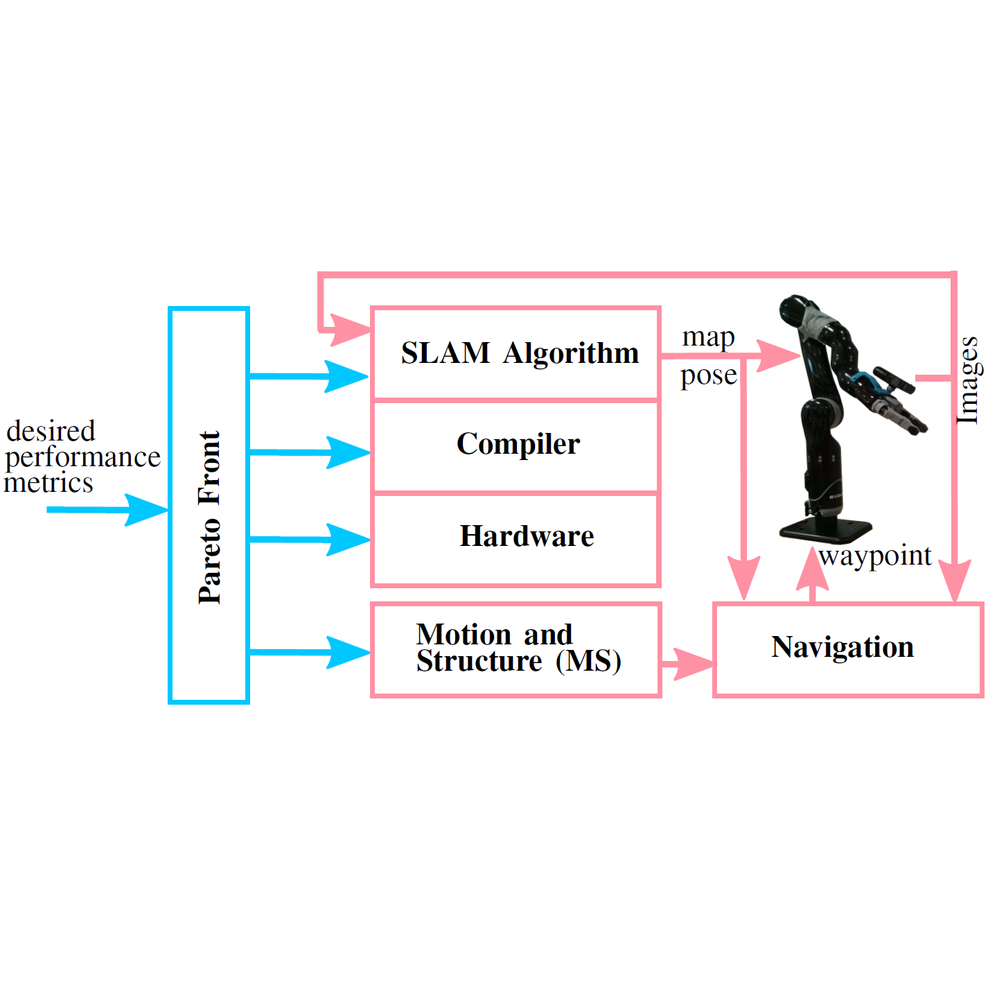
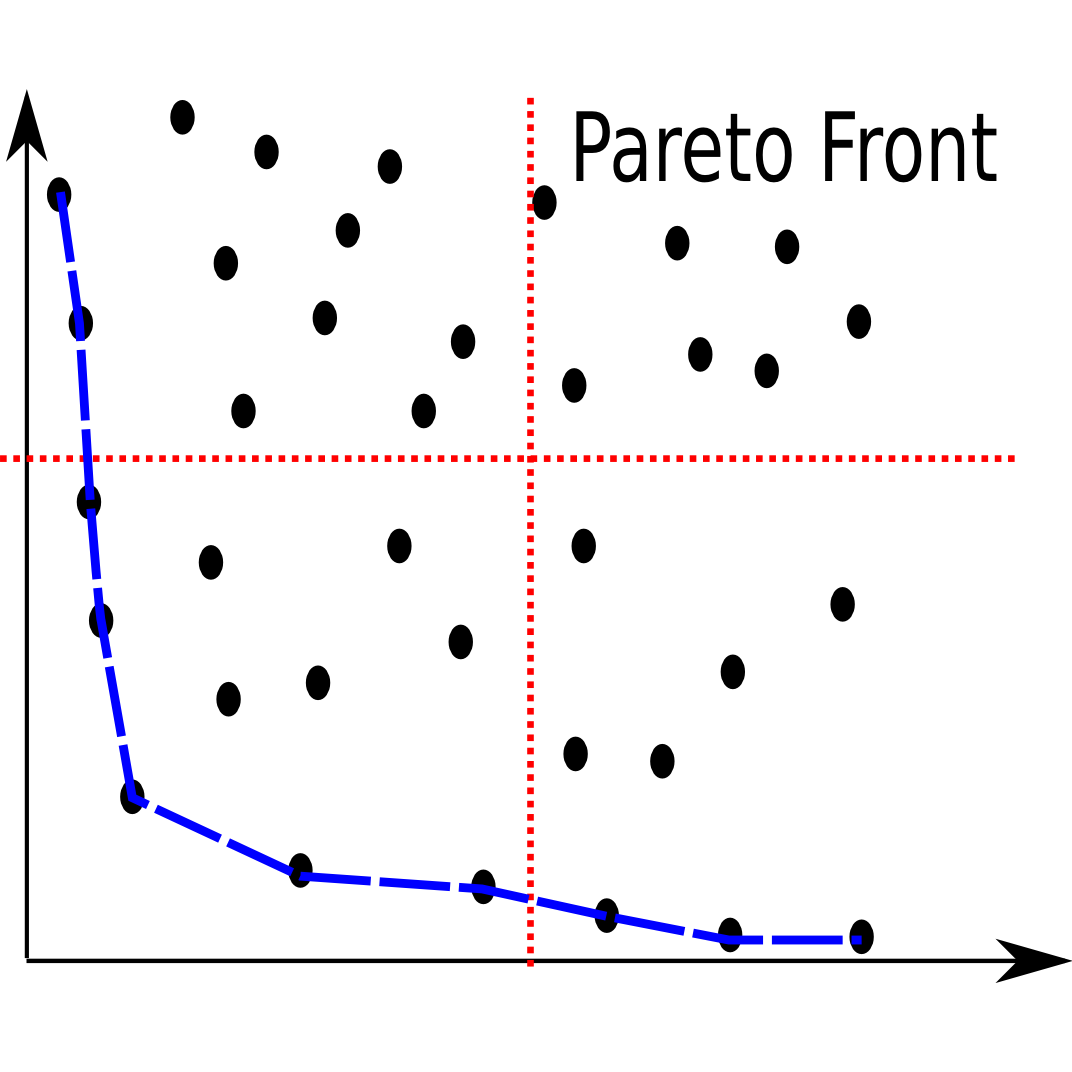
[39] Application-oriented Design Space Exploration for SLAM Algorithms
Sajad Saeedi, Luigi Nardi, Edward Johns, Bruno Bodin, Paul H J Kelly, Andrew J Davison
IEEE International Conference on Robotics and Automation (ICRA)
Singapore, May 29 - June 3, 2017
[40] Algorithmic Performance-Accuracy Trade-off in 3D Vision Applications Using HyperMapper
Luigi Nardi, Bruno Bodin, Sajad Saeedi, Emanuele Vespa, Andrew J Davison, Paul H J Kelly
International Workshop on Automatic Performance Tuning (iWAPT), hosted by IEEE International Parallel and Distributed Processing Symposium (IEEE IPDPS)
Orlando, FL, USA, May 29 - June 2, 2017
2016
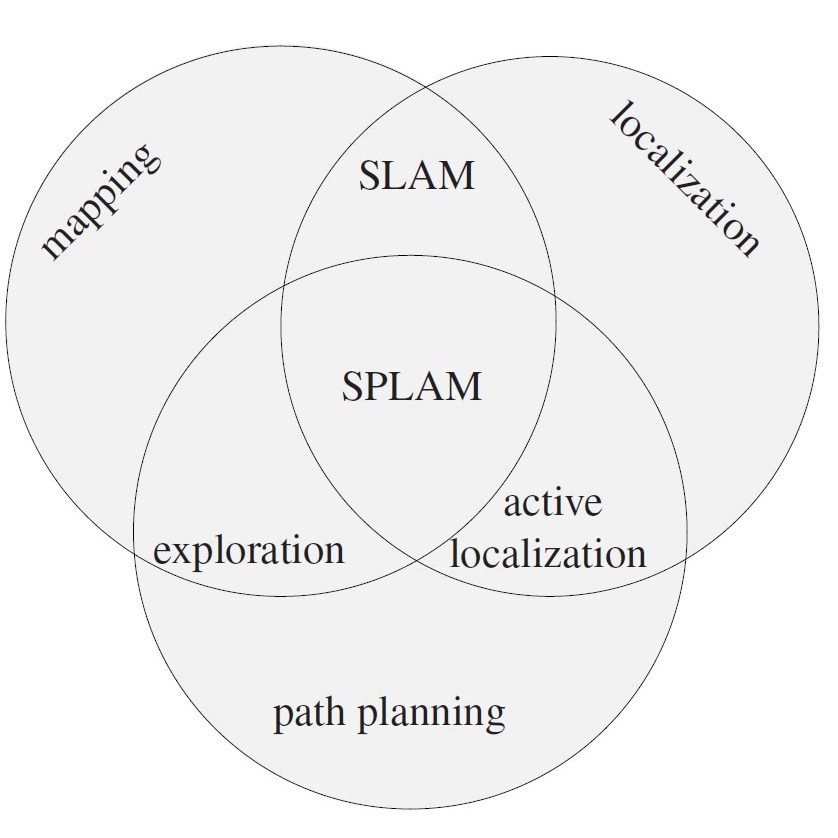
[41] Multiple-robot Simultaneous Localization and Mapping - A Review
Sajad Saeedi, Michael Trentini, Mae Seto, and Howard Li
Wiley, Journal of Field Robotics, vol. 33(1), pp. 3-46, 2016
[42] Requirements for building an ontology for autonomous robots
B. Bayat, J. Bermejo-Alonso, J. Carbonera, T. Facchinetti, S. Fiorini, P. Goncalves, V. A.M. Jorge, M. Habib, A. Khamis, K. Melo, B Nguyen, J. Isabelle Olszewska, L. Paull, E. Prestes, V. Ragavan, S. Saeedi, R. Sanz, M. Seto, B. Spencer, A. Vosughi, H. Li
Industrial Robot, vol. 43(5), pp. 469-480, 2016

[43] 3D Mapping and Navigation for Autonomous Rotorcraft
Sajad Saeedi, Amr Nagaty, Carl Thibault, Michael Trentini, Howard Li
IEEE Canadian Conference on Electrical and Computer Engineering (CCECE)
Vancouver, BC, Canada, May 15 -18, 2016
[44] The COBRA Heterogenous Multiple-robot Localization and Mapping Dataset
Sajad Saeedi, Carl Thibault, Amr Nagaty, Michael Trentini, Howard Li
IEEE Canadian Conference on Electrical and Computer Engineering (CCECE)
Vancouver, BC, Canada, May 15 -18, 2016
2015

[45] The COBRA Fixed-wing Georeferenced Imagery Dataset
Sajad Saeedi, Carl Thibault, Michael Trentini, and Howard Li
International Journal of Intelligent Unmanned Systems, vol. 3(2), pp. 62-71, 2015
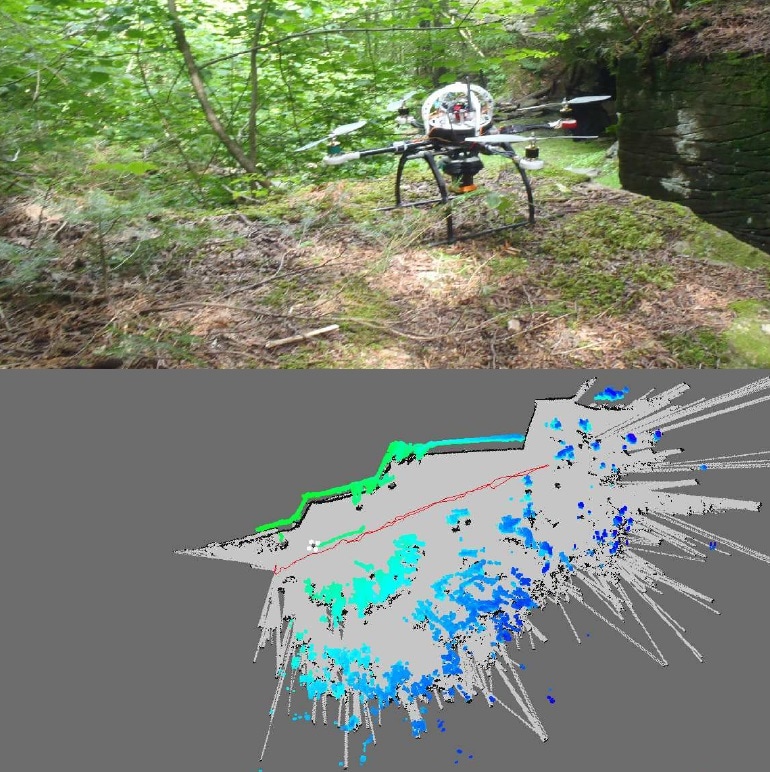
[46] Perception and Navigation for an Autonomous Quadrotor in GPS-denied Environments
Sajad Saeedi, Amr Nagaty, Carl Thibault, Michael Trentini, Howard Li
International Journal of Robotics and Automation
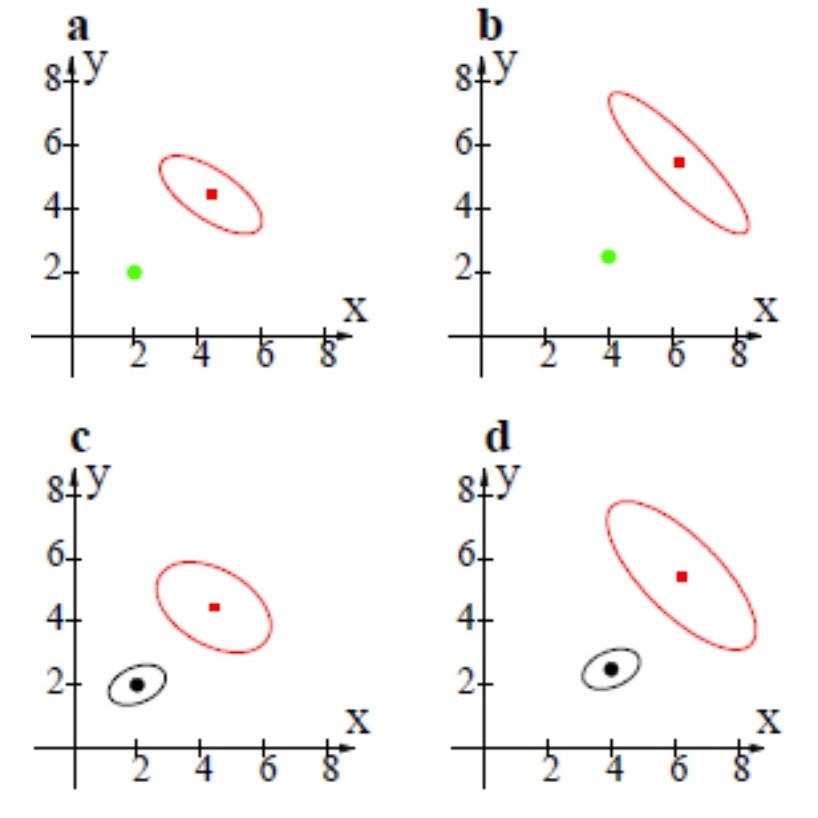
[47] Occupancy Grid Map Merging for Multiple-robot Simultaneous Localization and Mapping
Sajad Saeedi, Liam Paull, Michael Trentini, and Howard Li
International Journal of Robotics and Automation, vol. 30(2), pp. 149-157, 2015
[48] Hybrid Approach for Multiple-robot SLAM with Particle Filtering
Sajad Saeedi, Michael Trentini, Howard Li
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Hamburg, Germany, Sep 28- Oct 2, pp. 3421 - 3426, 2015
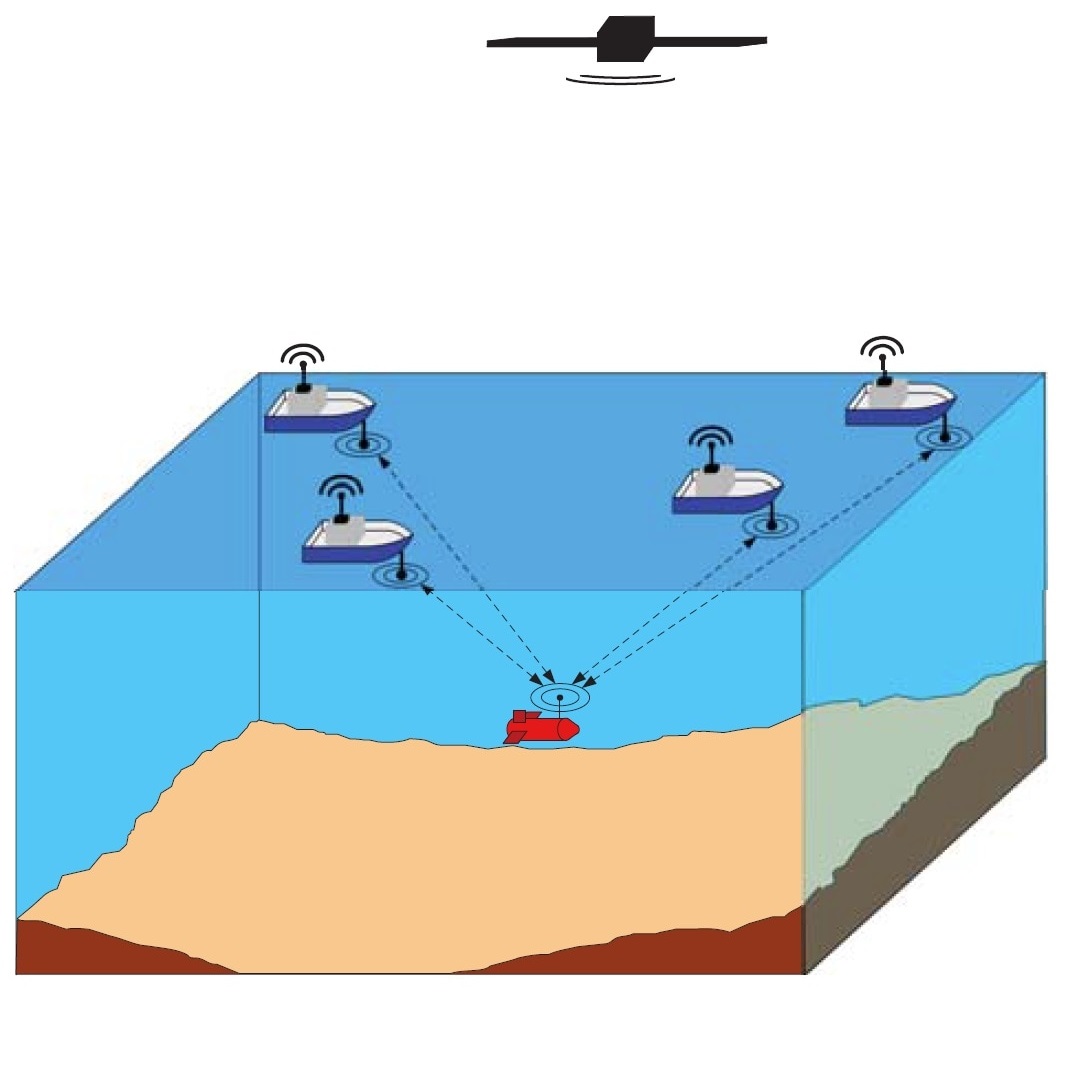
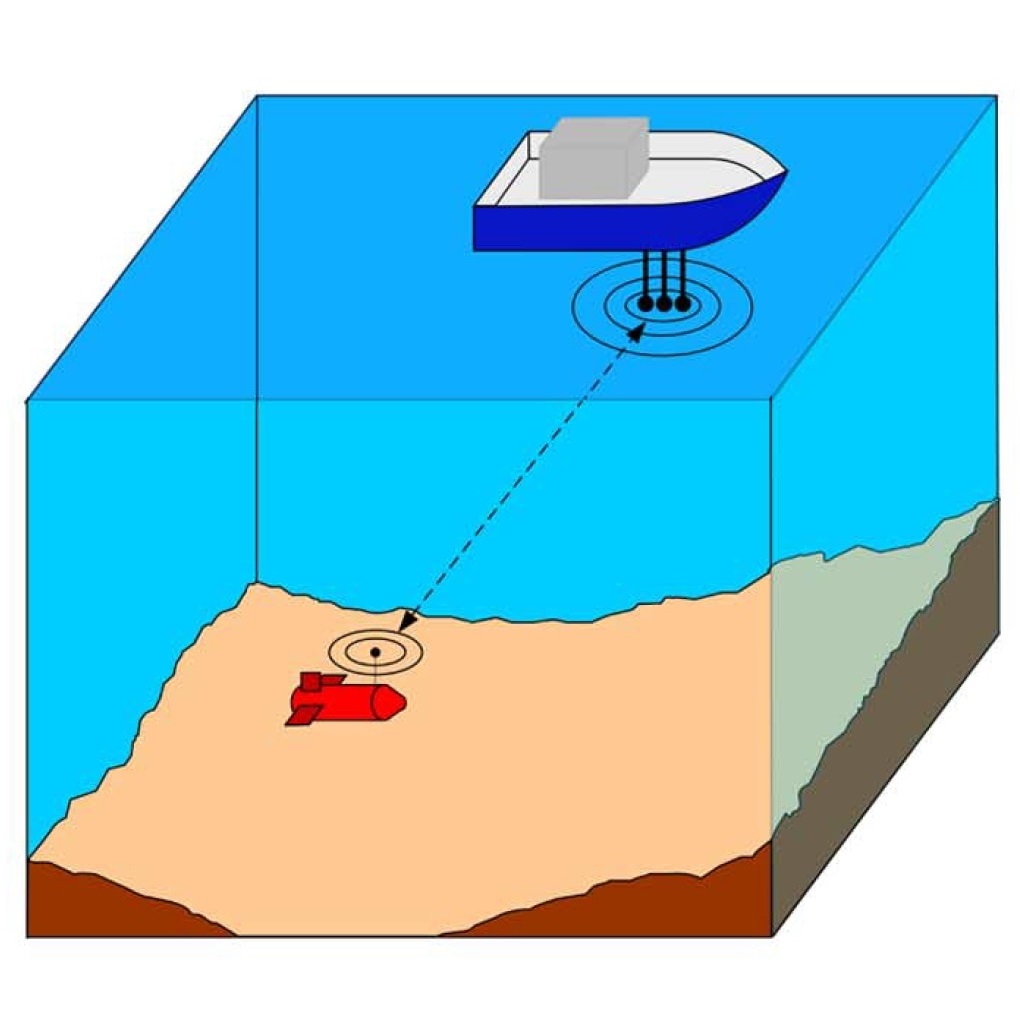
[49] Fast Monte Carlo Localization of AUV Using Acoustic Range Measurement
Sajad Saeedi, Mae Seto, Howard Li
IEEE Canadian Conference on Electrical and Computer Engineering (CCECE)
Halifax, NS, Canada, May 3-6, pp. 326-331, 2015
2014
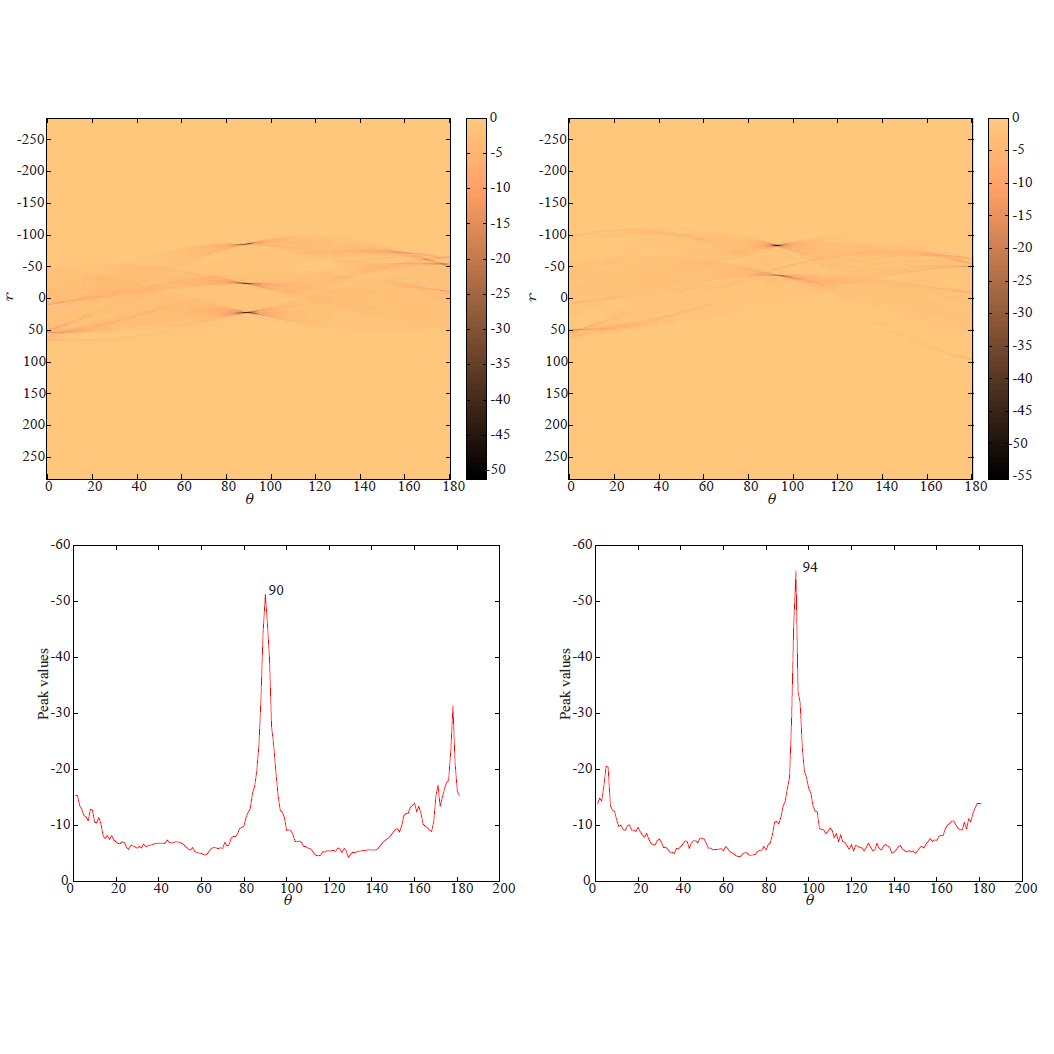
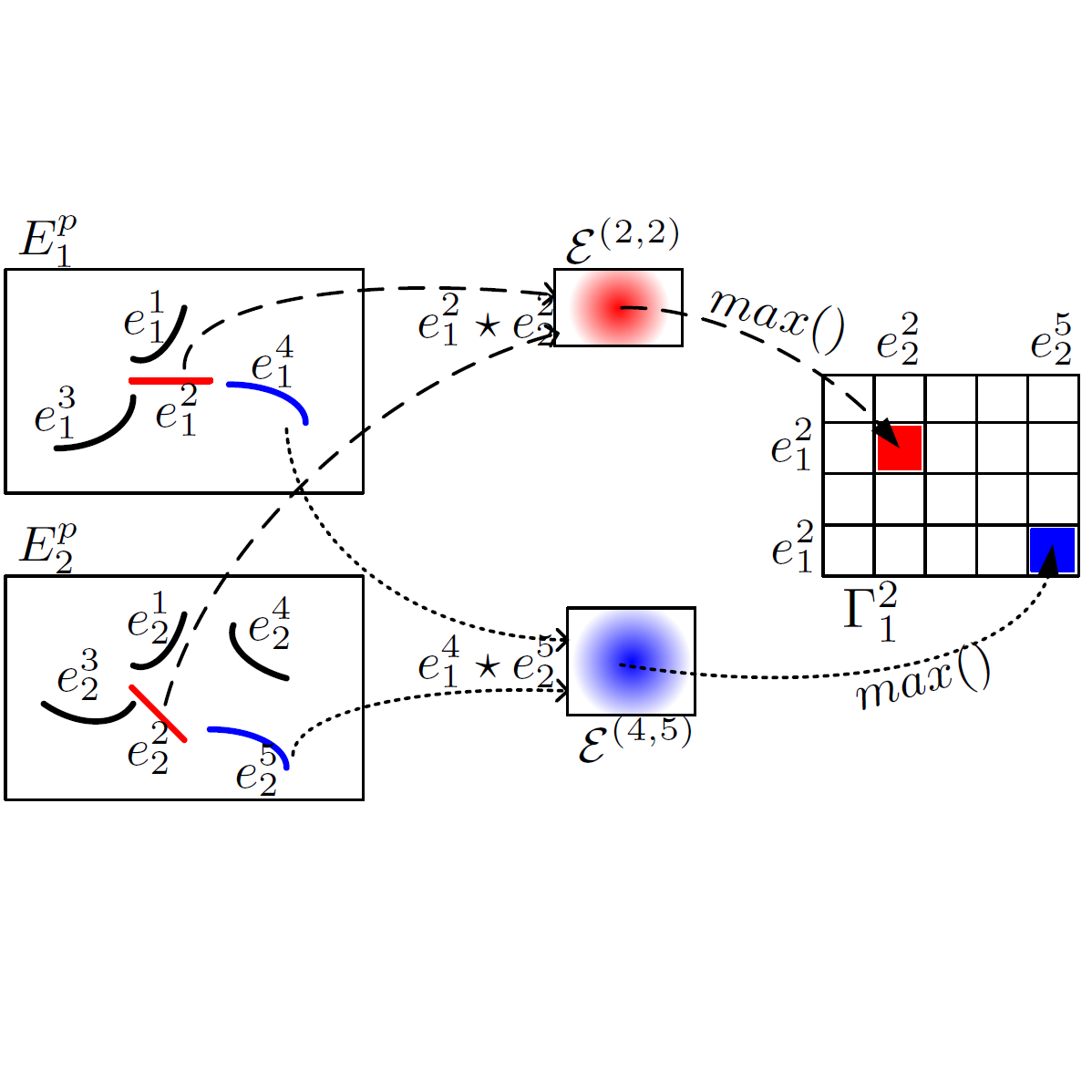
[50] Map Merging for Multiple Robots Using Hough Peak Matching
Sajad Saeedi, Liam Paull, Michael Trentini, Mae Seto, and Howard Li
Elsevier, Robotics and Autonomous Systems, vol. 62(10), pp. 1408–1424, 2014
[51] Group Mapping: A Topological Approach to Map Merging for Multiple Robots
Sajad Saeedi, Liam Paull, Michael Trentini, and Howard Li
IEEE Robotics and Automation Magazine, vol. 21(2), pp. 60-72. 2014
[52] AUV Navigation and Localization - A Review
Liam Paull, Sajad Saeedi, Mae Seto, Howard Li
IEEE Journal of Oceanic Engineering, vol. 39(1), pp. 131 149, 2014
[53] Perception and Navigation for Autonomous Rotorcraft
Sajad Saeedi, Amr Nagaty, Carl Thibault, Michael Trentini, Howard Li
International Conference on Intelligent Unmanned Systems (ICIUS)
Montreal, QC, Canada, Sep 29 - Oct 1, 2014
2013
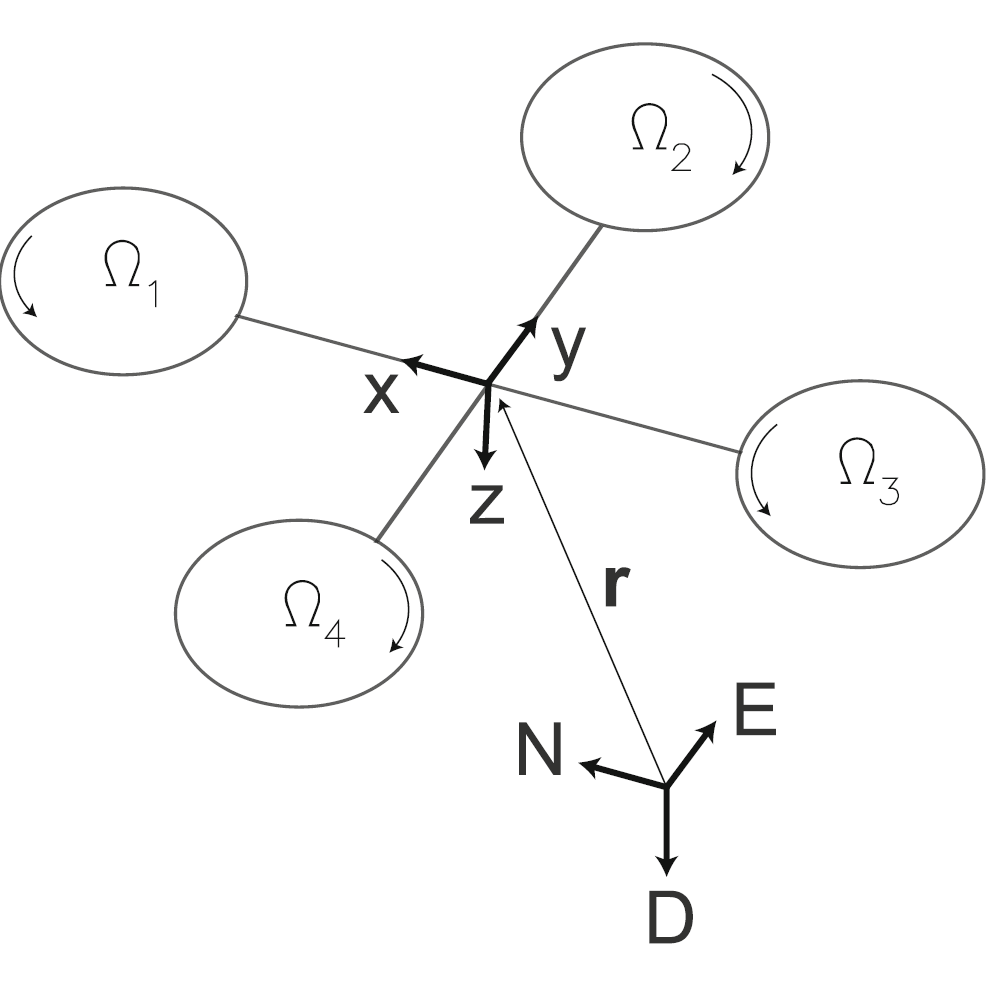
[54] Control and Navigation Framework for Quadrotor Helicopters
Amr Nagaty, Sajad Saeedi, Carl Thibault, Mae Seto, Howard Li
Springer, Journal of Intelligent and Robotic Systems, vol. 70(1-4), pp. 1-12, 2013
[55] Sensor-Driven Online Coverage Planning for Autonomous Underwater Vehicles
Liam Paull, Sajad Saeedi, Mae Seto, Howard Li
IEEE/ASME Transactions on Mechatronics, vol. 18(6), pp. 1827-1838, 2013
2012

[56] Neural Network-based Multiple-robot Simultaneous Localization and Mapping
Sajad Saeedi, Liam Paull, Mike Trentini, Howard Li
IEEE Transactions on Neural Networks, vol. 22(12), pp. 2376-2387, 2012
[57] Map Merging Using Hough Peak Matching
Sajad Saeedi, Liam Paull, Michael Trentini, Mae Seto, Howard Li
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Vilamoura, Algarve, Portugal, Oct 7-12, pp. 4683-4688, 2012
[58] Efficient Map Merging Using a Probabilistic Generalized Voronoi Diagram
Sajad Saeedi, Liam Paull, Michael Trentini, Mae Seto, Howard Li
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Vilamoura, Algarve, Portugal, Oct 7-12, pp. 4419-4424, 2012
[59] Sensor Driven Online Coverage Planning for Autonomous Underwater Vehicles
Liam Paull, Sajad Saeedi, Mae Seto, Howard Li
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Vilamoura, Algarve, Portugal, Oct 7-12, pp. 2875-2880, 2012
[60] Towards An Ontology for Autonomous Robots
Liam Paull, Gaetan Severac, Guilherme V. Rao, Julian M. Angel, Harold Boley, Maki K. Habib, Bao Nguyen, Veera R. S. Kumar, Sajad Saeedi, Ricardo Sanz, Mae Seto, Aleksandar Stefanovski, Michael Trentini, Howard Li
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Vilamoura, Algarve, Portugal, Oct 7-12, pp. 2875-2880, 2012
[61] Control and Navigation Framework for Quadrotor Helicopters
Amr Nagaty, Sajad Saeedi, Carl Thibault, Mae Seto and Howard Li
International Conference On Unmanned Aircraft Systems (ICUAS)
Montreal, QC, Canada, June 12 - June 15, 2012
2011
[62] Neural Network-based Multiple-robot Simultaneous Localization and Mapping
Sajad Saeedi, Liam Paull, Michael Trentini, Howard Li
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
San Francisco, CA, USA, Sept 25-30, pp. 880-885, 2011
[63] Multiple-robot Simultaneous Localization and Mapping
Sajad Saeedi, Liam Paull, Michael Trentini, Howard Li
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
San Francisco, CA, USA, Sept 25-30, pp. 853-888, 2011
[64] A Multi-agent Framework with MOOS-IvP for Autonomous Underwater Vehicles with Sidescan Sonar Sensors
Liam Paull, Sajad Saeedi, Mae Seto, Howard Li
International Conference on Autonomous and Intelligent Systems (AIS)
Burnaby, BC, Canada, June 22-24, pp. 41-50, 2011
2010
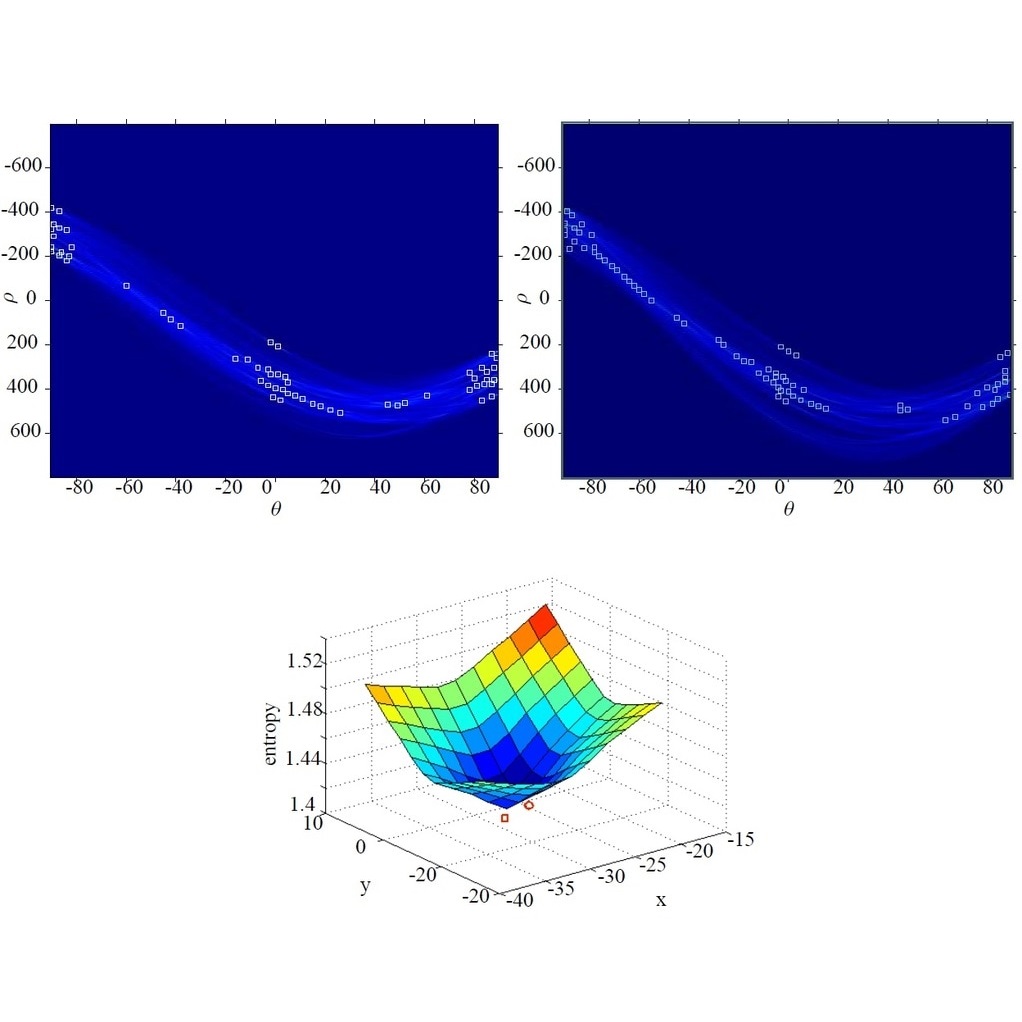
[65] An Information Gain Based Adaptive Path Planning Method for an Autonomous Underwater Vehicle Using Sidescan Sonar
Liam Paull, Sajad Saeedi, Howard Li, Vincent Myers
IEEE Conference on Automation Science and Engineering (CASE)
Toronto, ON, Canada, Aug 21-24, pp. 835-840, 2010
2009
[66] Optimal Design of Rotating Sliding Surface for Sliding Mode Control
Sajad Saeedi, Mohammad Beheshti
American Control Conference (ACC)
St. Louis, MO, USA, June 10-12, pp. 774-777, 2009
2006
[67] Robust Window-Based Active Queue Management Based on H-infinity Control
Mehdi Monemi, Sajad Saeedi
International Journal of Information Science and Technology, vol. 4(1), pp. 13-22, 2006
2005
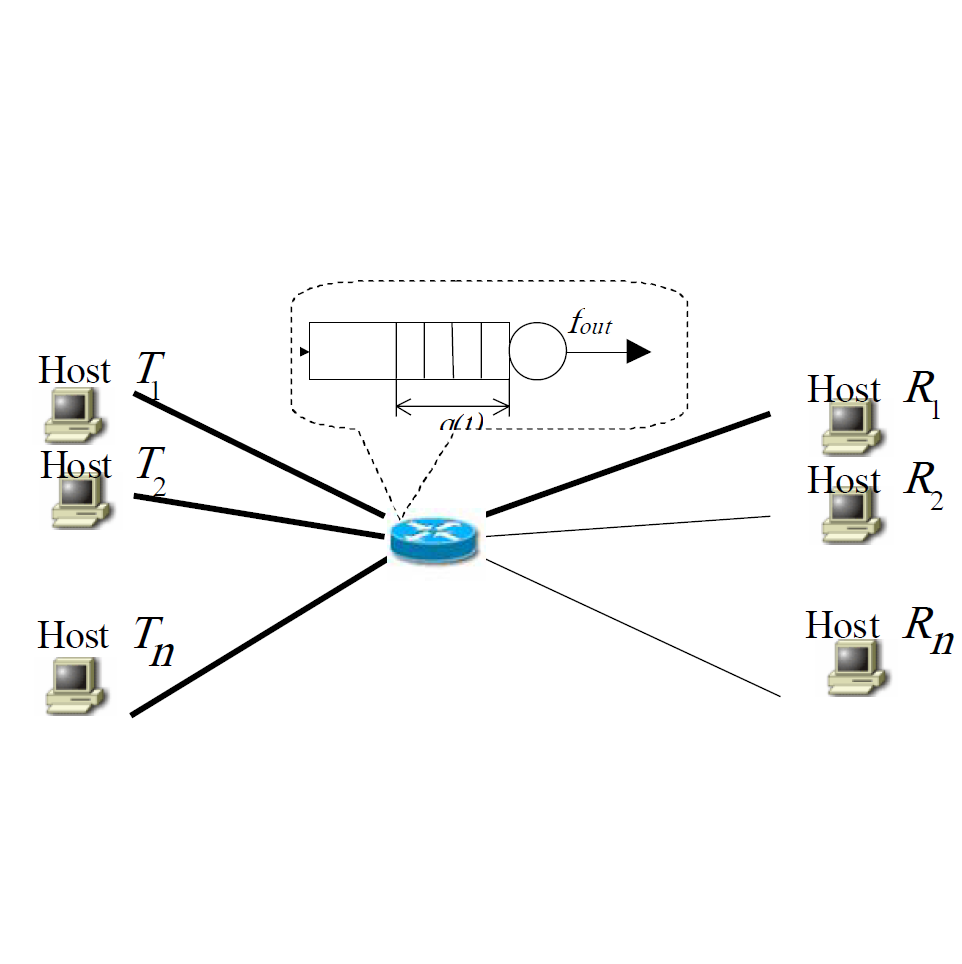
[68] Active Queue Management (AQM) for TCP/IP networks Using Discrete-Time Sliding Mode Control (DSMC)
Sajad Saeedi, Mohammad Beheshti, Mehdi Monemi
IEEE Conference on Control Applications (CCA)
Toronto, ON, Canada, Aug 28-30, pp. 727-730, 2005
Patents
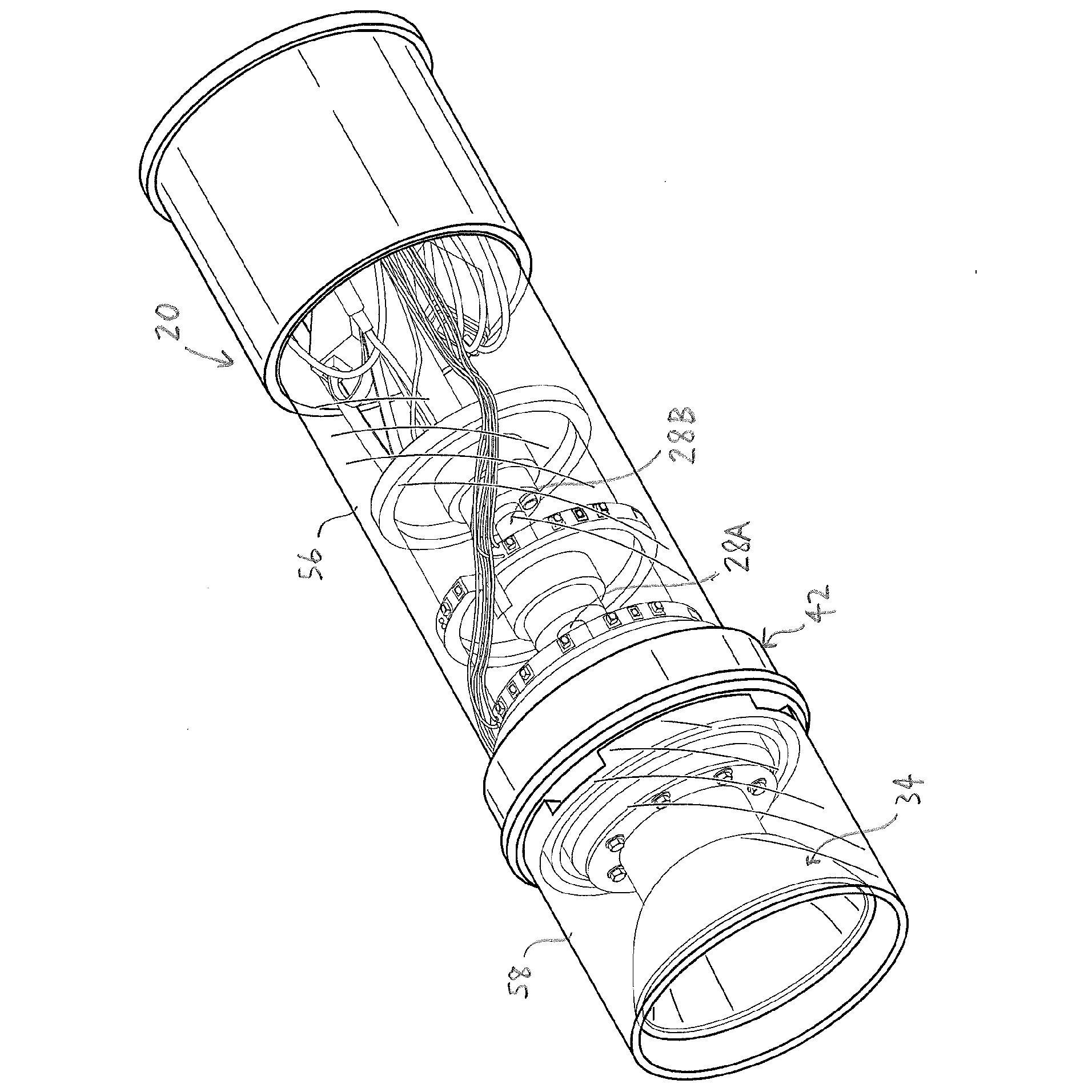
Optical Guide Assembly and System Including Same
Jason G. Gillham, Christopher A Gilson, Sajad Saeedi, Shawn O. Satchell
United States Patent and Trademark Office, US20190017941A1, 2017
Book Chapters
Navigation for Underwater Vehicles
Liam Paull, Mae Seto, Sajad Saeedi, John Leonard
Encyclopedia of Robotics, 2018
Path Planning for Autonomous Underwater Vehicles
Liam Paull, Sajad Saeedi, Howard Li
Springer, Autonomy for Marine Robots, pp. 177-224
Introduction to Autonomy for Marine Robots
Mae Seto, Liam Paull, Sajad Saeedi
Springer, Autonomy for Marine Robots, pp. 1-46
PhD Thesis
Multiple-robot Simultaneous Localization and Mapping
Sajad Saeedi
University of New Brunswick, 2014