This page lists open-source software and datasets accompanied by publications.
Software
Here is a list of open-source software released with the papers:
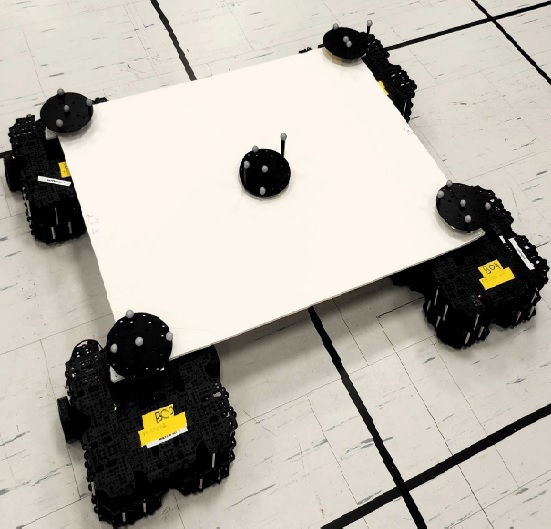
MR.CAP
MR.CAP (Multi-robot Joint Control and Planning for Object Transport) is a novel approach to solving simultaneous multi-robot control and planning problems. The implementation is in C++, making use of factor graphs.
Keywords: Object Transport, Control, Planning, Multiple Robots, Factor Graph, MPC
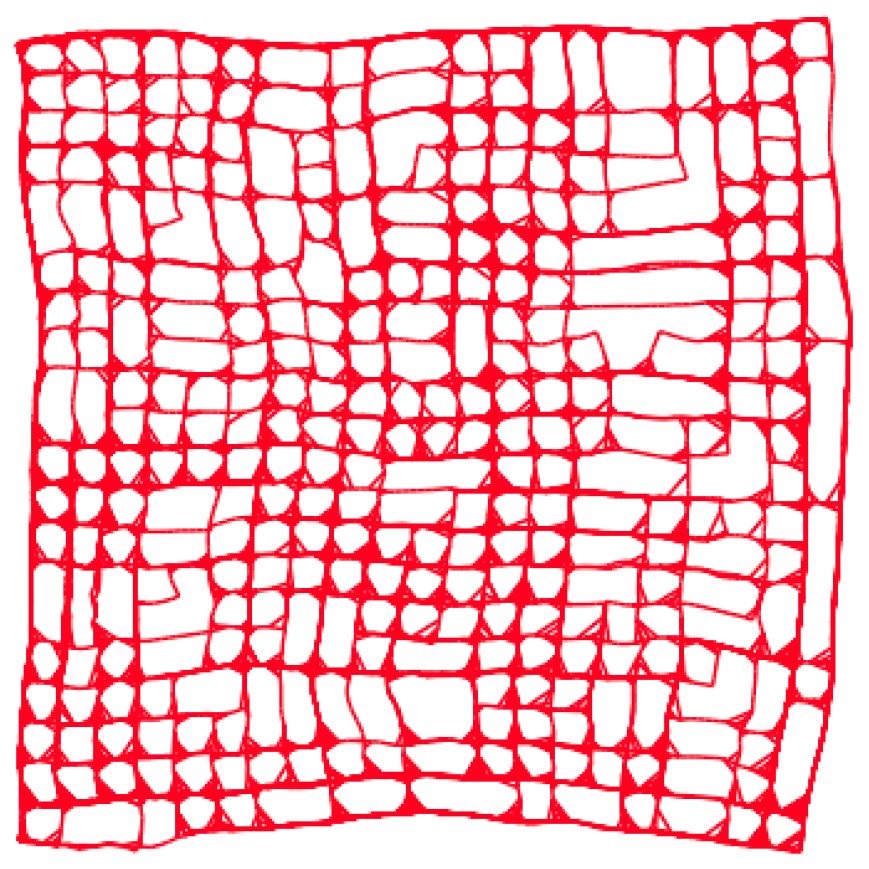
RL-PGO
RL-PGO (Reinforcement Learning-based Planar Pose-Graph Optimization) is a deep reinforcement learning-based 2D pose-graph optimization. It shows that the PGO problem can be modeled as a partially observable Markov Decision Process.
Keywords: Reinforcement Learning, Pose-Graph Optimization
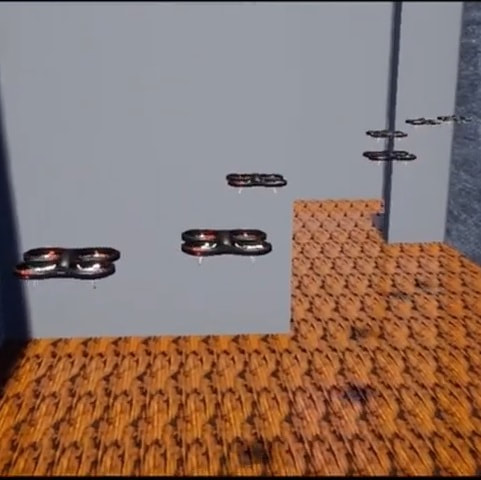
PRL4AirSim
PRL4AirSim (Parallel Reinforcement Learning for AirSim) provides efficient parallel training for Reinforcement Learning-based quadrotor controllers. PRL4AirSim provides a simulation framework, built on AirSim, which provides efficient parallel training.
Keywords: Reinforcement Learning, Quadrotor Controllers
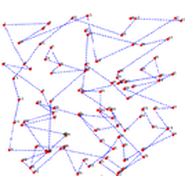
Pareto Frontier Approximation Network (PA-NET)
PA-Net presents a network that generates good approximations of the Pareto front for the bi-objective traveling salesperson problem (BTSP). It is based on reinforcement learning and is easily extendable to more objectives.
Keywords: Reinforcement Learning, Travelling Salesperson Problem (TSP)
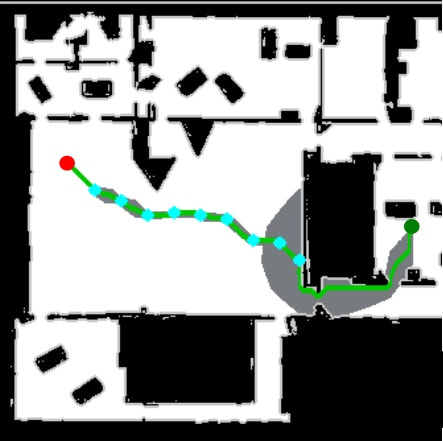
Waypoint Planning Networks (WPN)
WPN is a hybrid motion planning algorithm based on LSTMs (Long Short-term Memory Networks). WPN produces a more computationally efficient and robust solution than other learned approaches.
Keywords: Supervised Learning, LSTMs, Path Planning
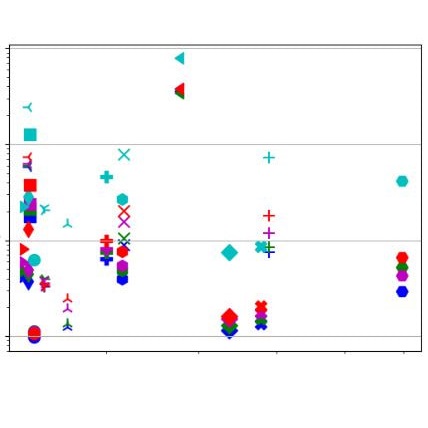
PathBench
PathBench is an open-source platform for developing, visualizing, training, testing, and benchmarking of existing and future, classical and learned 2D and 3D path planning algorithms, while offering support for Robot Operating System (ROS).
Keywords: Benchmarking, Path Planning
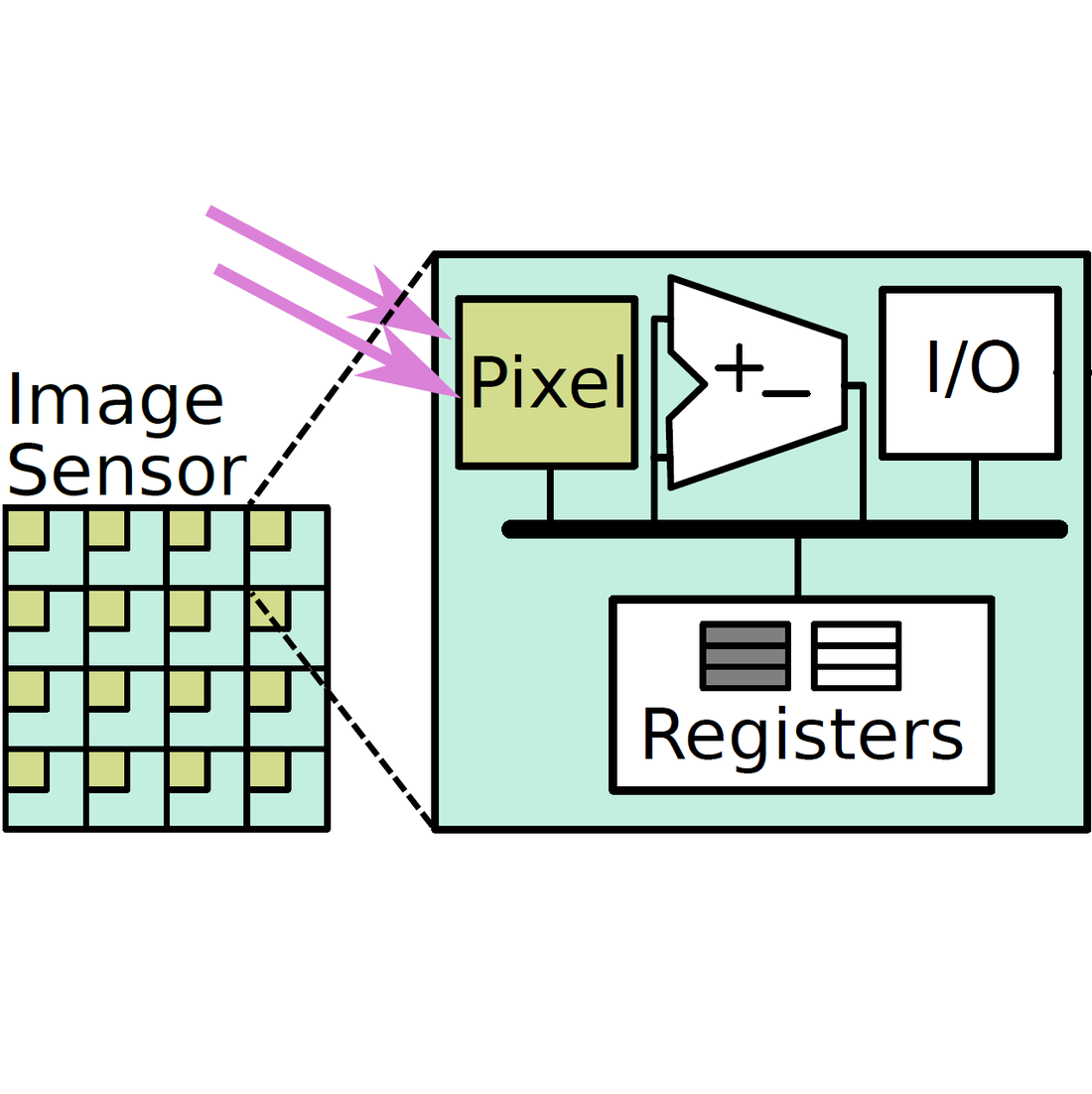
Cain
Cain is a compiler for convolutional filters that targets SCAMP-5, a general-purpose Focal-plane Sensor-Processor array. Cain generates code to evaluate multiple convolutional kernels at the same time.
Keywords: Code Generation, CNNs, FPSP
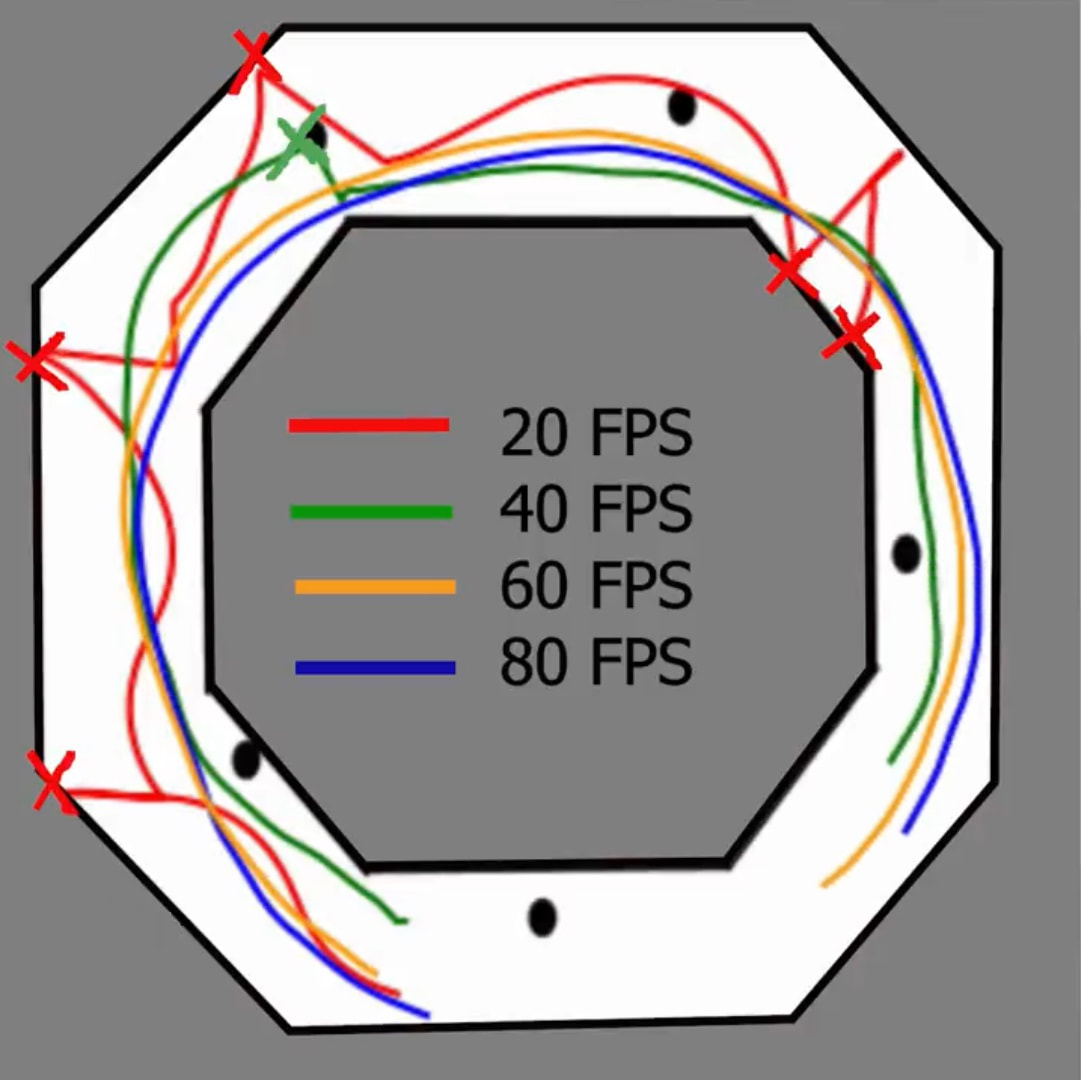
Auke
Auke (Automatic Kernel Code Generation) presents a code generator for convolution filters for the SCAMP-5 FPSP, with applications in many high-level tasks such as convolutional neural networks, pose estimation, and so on.
Keywords: Code Generation, CNNs, FPSP

SLAMBench
SLAMBench is a framework for benchmarking of SLAM algorithms across hardware and software. It offers a platform for a broad spectrum of future research in jointly exploring the design space of algorithmic and implementation-level optimizations.
Keywords: Benchmarking, Design Space Exploration, SLAM
Dataset
Here is a list of open-source dataset released with the papers:
DIO
DIO is a dataset of high-quality mesh models and RGB images collected from small and large indoor objects. The models can be imported to Gazebo for robotic experiments. The images can also be used to train radiance field models.
Keywords: Watertight Mesh, Dataset, RGB, Photogrammetry

InteriorNet
InteriorNet renders high-resolution and high frame-rate video sequences following realistic trajectories while supporting various camera types as well as providing inertial measurements.
Keywords: RGBD, Inertial, Panorama, Fisheye, Illumination, Normals, Semantics

ICL Dataset
ICL dataset uses a broad range of real-world trajectories in very high-quality scenes to create a set of synthetic datasets which are representative of key SLAM applications such as virtual reality (VR), micro aerial vehicle (MAV) flight, and ground robotics.
Keywords: RGBD, Inertial, Trajectory